Группа инженеров из Швейцарии, Германии и США, обучили робота ANYmal ходить, бегать и восстанавливаться после падений, используя алгоритмы искусственного интеллекта, а не заданные вручную алгоритмы-контроллеры.
Особенность работы также заключается в том, что сначала алгоритм обучался во время симуляции, а затем выученный навык удалось перенести на реального робота, рассказывают авторы статьи в Science Robotics, сообщает N+1.
Инженеры уже создали множество ходячих роботов разных конструкций, в том числе достаточно совершенных. К примеру, широко известны роботы компании Boston Dynamics, способные удерживаться на ногах после ударов.
Однако помимо аппаратной составляющей не менее важна программная. И здесь пока существует явная проблема — обычно инженерам приходится разрабатывать алгоритмы-контроллеры самостоятельно, основываясь на поведении реальных ходячих животных или виртуальных моделей. Такой подход отнимает много времени, а также не гарантирует, что разработчики найдут оптимальную походку для имеющейся конструкции.
Существуют работы, в которых инженеры использовали нейросеть для управления и сначала симулировали ее поведение в виртуальном мире, а затем переносили в реальный, но в них использовались роботы с простой конструкцией.
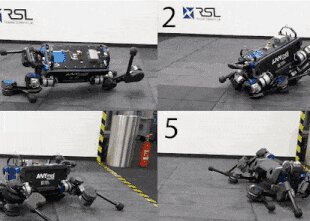
Группа инженеров под руководством Марко Хюттера (Marco Hutter) из Швейцарской высшей технической школы Цюриха использовала аналогичный подход, но применила его для гораздо более сложного по конструкции робота ANYmal.
Он имеет четыре ноги, состоящие из двух сегментов. Всего в роботе установлено 12 электромоторов — по три на каждую ногу, два из которых сгибают ее, а один, установленный в основании, отклоняет всю ногу вбок относительно корпуса.
Напомним, ранее Intel создала «нейросеть на флешке» стоимостью $100.
Также «Хвиля» сообщала, что Facebook совместно с Intel усовершенствуют ИИ в соцсети.
Также стало известно, что ИИ будет определять возраст человека по глазам.
Подписывайтесь на канал «Хвилі» в Telegram, на канал «Хвилі» в Youtube, страницу «Хвилі» в Facebook